
7x24小時咨詢熱線
400-660-3310
當前位置 : 好學校 長沙人工智能 長沙工控幫教育 課程正文
微信掃碼添加老師好友咨詢
長沙工控幫教育
認證等級
長沙工控幫教育
已獲好學校V2信譽等級認證
信譽值
與好學校簽訂讀書保障協議:
課程詳情
開班信息
校區地址
學校相冊
學員點評
學校問答
讀書保障
手機預訂再優惠![]()

微信關注好學校
報讀課程額外再返現
課程目標:
通過系統學習電工基礎知識、常用儀器儀表、EPLAN制圖軟件,西門子smart200PLC編程以及變頻器、觸摸屏、伺服的相關專業知識,實現對以上產品的正確選型、安裝調試、維護保養、故障處理、網絡通訊等,并能夠獨立完成一些小型項目。
培訓對象:
從事電氣自動化領域的維修工程師、編程人員、院校師生、設備管理人員
具備電工、電氣基礎知識。
課程內容:
一、電工基礎PLC技術學前培訓班:(2天)
1、電工基礎,配電標準及規范、常用電氣元件介紹、原理、應用及選型
2、電工基本控制電路,電氣圖紙設計規范學習
3、常用工控設備的應用及PLC基礎
4、光電傳感器、接近式開關應用與選型
5、熱電偶、熱電阻、紅外測溫儀
6、電磁閥、氣缸、氣動閥門介紹與應用場合
二、EPLAN電氣制圖軟件培訓內容: (1-2天)
1、EPLAN 基礎操作技能
(1) EPLAN2.3試用版軟件安裝
(2) 軟件界面講解,以及快捷鍵,工具欄,視圖的定制
(3) 項目的創建及屬性設置
(4) 頁的基本操作及屬性講解
(5) 圖形編輯器的基本操作
(6) 符號庫的基本使用
(7) 文本類型介紹和使用
(8) 符號宏窗口宏的創建及調用
(9) 報表的生成
(10) 端子連接圖的生成
三、西門子S7-200SMART編程:(20天)
硬件篇:
1.S7-200SMART提供了哪些類型的CPU,及重要性能參數詳解
2.CPU外形結構介紹
3.SMART應用輸入輸出接線詳解
4.CPU如何選型及注意事項詳解
5.信號板擴展選型
6.擴展模塊選型
7.SMART系列產品及訂貨號總覽
軟件篇:
1.軟件的安裝及整體界面的設置
2.編程軟件與CPU通信連接及程序的上傳下載
3.菜單欄基本功能應用
4.系統塊組態設置
5.符號表的應用
6.狀態圖表及程序狀態監控的應用
7.數據塊的應用
8.交叉引用的應用
編程基礎:
1.PLC中常用數據類型(B00L、Byte、Word、DWord、INT、DINT、REAL)
2.進制的概念及不同進制之間的轉換
3.SMART提供了哪些存儲區(I、Q、M、S、V、L、SM、T、C、AI、AQ、AC、HC)
4.SMART存儲區的尋址方式及數據存儲方式
5.PLC工作原理及掃描方式
基本指令:
1.基本位邏輯指令(常開觸點、常閉觸點、線圈輸出、置位、復位、上升沿、下降沿、置位優先、復位優先及立即指令)的應用及注意事項。
2.定時器(TON、TOF、TONR)的應用
3.計數器(CTU、CTD、CTUD)的應用與遞增(INC)、遞減指令(DEC)配合比較指令應用的異同詳解
4.順序控制指令(SCR、SCRE、SCRT及置位、復位)應用詳解
5.移位寄存器(SHRB)及其它移位指令(SHL、SHR、ROL、ROR)講解
6.傳送指令(單個傳送MOV、塊傳送BLKMOV、填充指令FILL_N、字節交換指令SWAP)應用詳解
7.轉換指令(B_I、I_B、I_DI、DI_I、DI_R、ROUND、TRUNC、BCD_I)應用詳解
8.讀取實時時鐘(READ_RTC)、設置時鐘(SET_RTC)的應用詳解
9.整數四則運算(ADD、SUB、MUL、DIV)及浮點數運算(ADD_R、SUB_R、MUL_R、DIV_R、SIN、COS、TAN、SQRT)指令應用詳解
10.FOR/NEXT循環指令講解、JMP/LBL條件跳轉指令講解、STOP/WDR/END等指令介紹、邏輯運算指令WAND(與)、WOR(或)、INV(非)、WXOR(異或)指令簡介
11.間接尋址應用講解
子程序篇:
1.S7-200 SMART的程序結構:主程序(OB1)、子程序(SBR)及中斷程序(INT)之間的關系、功能及使用方法。
2.不帶參數的子程序編寫及調用
3.帶參數的子程序編寫及調用。局部變量的分類(IN、OUT、IN_OUT、TEMP)及變量表中定義方法
4.庫的創建及使用方法:
(1)不帶全局V存儲區的庫創建方法及調用
(2)帶有全局V存儲區的庫創建方法及調用
中斷篇:
1.中斷的概念及應用場合詳解
2.S7-200SMART提供的中斷事件及分類(通信中斷、I/O中斷、定時中斷)
3.中斷指令(ENI、DISI、ATCH、DTCH、RETI、CLR_EVNT)及編程步驟詳解
4.中斷應用案例講解
高速計數篇:
1.高速計數的概念與普通計數器的區別及高速計數器常用場合詳解
2.編碼器的工作原理及在高速計數中的應用詳解
3.高速計數器的輸入分配接線及工作模式詳解
4.高速計數器對于控制字節功能詳解
5.高速計數指令(HDEF、HSC)詳解
6.高速計數程序及配合中斷的程序編寫步驟詳解
7.高速計數向導的組態及應用
8.高速計數的幾個實際應用講解
運動控制篇:
1.脈寬調至輸出程序的編寫及向導的應用
2.步進電機的原理及步進驅動接線應用
3.運動控制向導組態
4.運動子例程的應用:
AXISx_CTRL:初始化, AXISx_MAN:手動, AXISx_GOTO:單段定量
AXISx_RUN:多段曲線,AXISx_RSEEK:搜尋參考點,AXISx_LDPOS:更改當前值
AXISx_SRATE:更改加速、減速和急停時間,AXISx_CFG:重新加載組態
5.運動控制應用實例講解
通信篇:
1.串行通信與并行通信的概念及單工通信、半雙工通信與全雙工通信的異同
2.串行通信口分類(RS485、RS232、RS422)
3.S7-200SMART支持的通信協議(Modbus RTU、PPI、USS、GET/PUT、開放以太網TCP、Modbus TCP)介紹
4.Modbus RTU通信協議簡介
5.講解Modbus RTU通信程序的編寫
6.講解GET/PUT向導組態及程序編寫
7.講解開放以太網通信程序的編寫
8.講解USS通信程序的編寫
模擬量PID:
1.模擬量與數字量的區別
2.常用模擬量傳感器與模塊的連接及模塊的組態設置
3.模擬量與數字量之間的轉換關系及外部物理量的換算
4.PID控制簡介
5.PID向導組態及程序編寫詳解
6.PID應用之恒溫恒壓控制
四、公共基礎班:(5天)
1、觸摸屏(威綸通)
(1) 觸摸屏工作原理、選型、安裝
(2) 觸摸屏工程的監理、基本元件的使用、系統設置
(3) 觸摸屏與PLC的通訊、參數設置,程序的上傳和下載
(4) 報警畫面、趨勢圖、歷史數據、密碼設定的設計
(5) 人機界面整體設計思路講解:主畫面、手動、輸入輸出、報警趨勢畫面、歷史數據、參數設置等
2、變頻器應用(英威騰和西門子V20)
(1) 變頻器種類介紹、應用及選型
(2) 變頻器接線及多功能端子應用
(3) 針對不同功能的參數設置
(4) PLC控制變頻器的程序編寫
3、伺服電機(西門子V90)
(1) 西門子V90伺服選型
(2) V90伺服的外部接線
(3) V90伺服工作模式:
外部脈沖位置控制模式(PTI)、內部設定值位置控制模式(IPOS)
速度控制模式(S)、扭矩控制模式(T)
(4) 伺服面板及調試軟件V-ASSISTANT的使用
(5) V90外部脈沖位置控制模式(PTI)的外部接線及參數設置
(6) V90內部設定值位置控制模式(IPOS)參數設置
V90速度控制模式(S)的參數設置
五、運用西門子PLC對工業機器人工作站進行集成運用 2天
六、工業機器人專題講座(2課時)
1、認識工業機器人與自動化;2、行業發展現狀;3、人才需求;4、培養系統
七、工業機器人基礎理論和實踐——工業機器人操作應用技巧(48課時)
1、ABB機器人基礎操作知識:ABB機器人實際應用與指南、配置必要的操作環境、數據的備份與恢復、機器人安全使用、基本操作規程
2、機器人本體介紹:工業機器人的硬件結構,零部件說明
3、ABB機器人IO通訊:I/O通訊種類、I/O板的說明、總線的連接、I/O信號監控與操作、Profibus適配器的連接、系統輸入系統輸出與I/O關聯、示教器可編程按鍵使用等
4、ABB機器人程序數據:建立程序數據的操作、數據類型與分類、三個關鍵程序數據的設定、復雜程序數據的賦值
5、ABB機器人程序編程:RAPID程序及指令、建立程序模塊與例行程序、常用RAPID程序指令、建立一個可運行的基本RAPID程序、程序模塊保存、基本運動指令講解
6、ABB機器人硬件連接:機器人控制柜、本體間的連接、安全保護機制、ES與AS的應用示例、緊急停止后的恢復操作、SMB電池的更換簡介
7、ABB機器人進階功能:安裝調試一般步驟、系統信息查看、重新啟動功能、系統的控制面板、在線幫助的閱讀
八、ABB工業機器人仿真軟件RobotStudio的使用——工業機器人自動化工程應用虛擬仿真(74課時)
1、RobotStudio軟件安裝:RobotStudio軟件安裝、機器人虛擬系統的建立
2、RobotStudio畫面視圖操作:RobotStudio畫面視圖操作(快捷鍵使用等)、創建機器人工作站
3、添加工具及控制器與測量工作功能操作:添加工具及控制器與測量工作功能操作、導入幾何體及幾何體空間中布置操作
4、RobotStudio仿真軟件中創建工具數據、工件數據:RobotStudio創建TOOL、WOBJ坐標系、手動操縱機器人
5、創建一個空間路徑及調試軌跡:創建一個空間路徑及調試軌跡、仿真運行與錄像
6、建模操作與工具的創建方法:建模操作與工具的創建方法
7、碰撞檢測設定及改變機器人目標點的設定:碰撞檢測設定及改變機器人目標點的設定、機器人從曲線生成路徑的操作
8、創建機械裝置:創建滑臺機械裝置、動態夾具機械裝置
9、使用機器人備份創建系統工作站:用機器人備份創建系統工作站、備份文件講解
10、SMART組件設定:SMART組件集中講解、利用Smart組件創建搬運、碼垛、壓鑄工作站。
九、工業機器人的電氣結構——工業機器人機械與電氣(37課時)
1、機器人本體介紹:拆裝機器人本體結構、更換機器人各軸電機齒輪箱、更換機器人各軸電機、氣缸軸承、拆裝使用工具
介紹
2、拆裝機器人電機:拆裝電機一軸、二軸、三軸、四軸、五軸、六軸及電機線路整理分類
3、拆裝機器人本體:拆裝機構一軸、二軸、三軸、四軸、五軸、六軸、校準
4、本體電纜拆裝:了解本體電纜數量及電路圖、本體氣源、用戶電纜、各型號機器人加油孔與瀉油孔
5、夾治工具安裝:工具安裝數據更改、電氣路連接、治具安裝規范
6、相關電路閱讀:控制模塊、軸計算機板、安全面板、主機、直流電源、I/O通訊板
7、拆裝控器柜電器組件:拆裝直流供電單元、計算機系統、安全系統、驅動單元、伺服系統講解、安全回路
8、電路異常處理講解:CF內存卡異常處理、主機電池更換、安全鏈原理圖、機器人電氣故障檢查、講解機器人相關電路原理圖、SMB與控制柜數據轉移
9、安全回路控制系統:A81 控制板上的各種功能講解及其M98 M2000、IRC5區別,多臺機器人連接常見現象及其處理方法
十、工業機器人典型應用簡介——工業機器人實訓課程(24課時)
1、工業機器人典型應用----搬運 任務目標、任務描述、標準I/O板配置、數字I/O配置、系統I/O配置、系統I/O配置、常用邏輯控制指令、注 釋行、Offs偏移功能、獲取機器人當前位置功能、常用寫屏指令、功能程序FUNC、工作站解包、創建備份并執行I啟動、創建工具數據、創建載荷數據、導入程序模板、程序注解、程序修改、示教目標點、LoadIdentify例行程序的使用、數字I/O信號配置參數介紹、系統輸入輸出、奇點管理等
2、工業機器人典型應用----碼垛 任務目標、任務描述、軸配置監控指令、計時指令、動作觸發指令、數組的應用、什么是中斷程序、復雜程序數據賦值、I/O信號別名的操作、利用數組存儲碼垛位置、帶參數例行程序、碼垛節拍優化技巧等
3、工業機器人典型應用----弧焊 任務目標、任務描述、虛擬I/O板及I/O配置、CrossConnection配置、I/O信號和ABB弧焊軟件的關聯、弧焊常用程序數據、弧焊常用指令、中斷程序使用說明、配置I/O信號與焊接軟件的關聯、CrossConnection說明、 創建工具數據、創建工件坐標系數據、Torch Services清槍系統、手動操縱轉盤、程序運行說明等。
4、工業機器人典型應用----壓鑄 任務目標、任務描述、機器人Profibus-DP適配器I/O配置、區域(WorldZones)的I/O信號設定、與WorldZones有關的程序數據、壓鑄取件應用常用程序令、EventRoutine介紹、WZCylDef圓柱體區域檢測設定指令、WZEnable激活臨時區域檢測指令、WZDisable激活臨時區域檢測指令等。
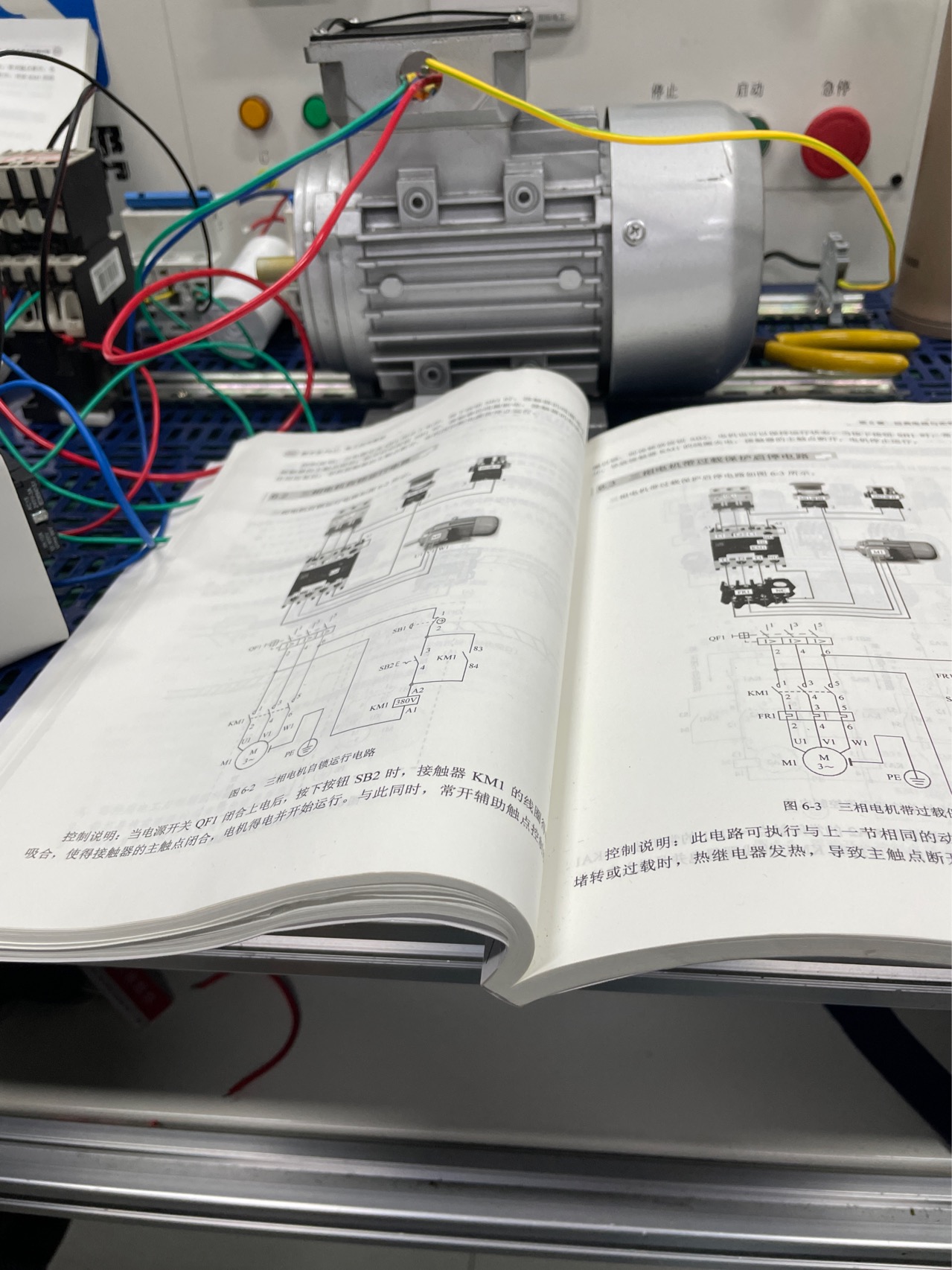
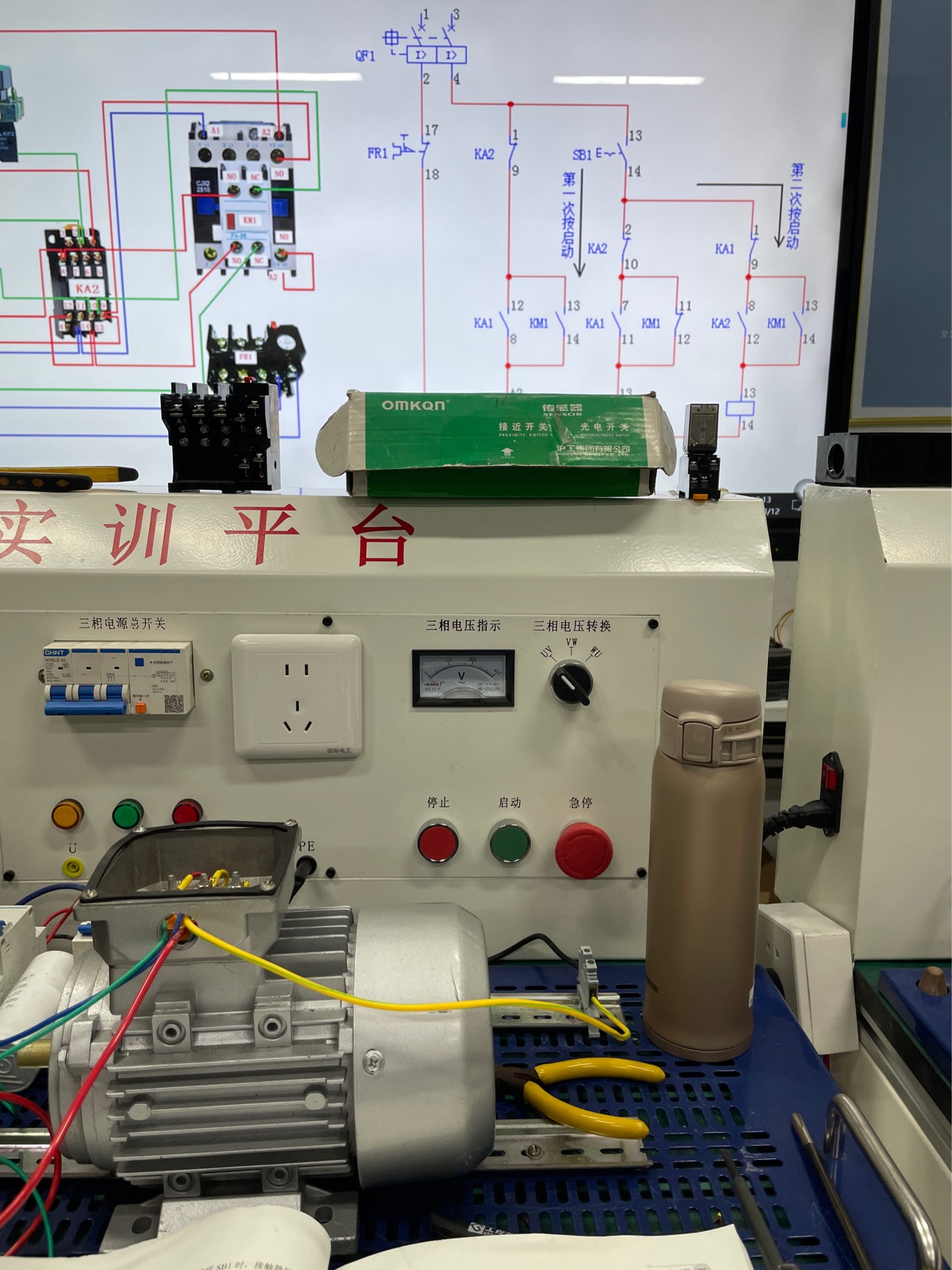
教學實景:


適用人群:
1)初、高中畢業生,大專大學畢業生
2)初級、中級、電工,電氣維護或維修人員
3)電氣設計人員、機械設計人員,機械維修人員
4)希望成為電氣自動化行業人才的有志之士
課程收益:
1)個人培訓技能大幅提升
2)晉升加薪的權威認證
3)設計圖紙,選型
4)獨立編寫程序,組態上位機
培訓說明:
1、理論教學與實習比例一般為1:1;提供培訓教材,及相關技術電子文檔;
2、培訓全程我們每個單元模塊會組織理論考試和實操評價考核。
3、企業選派的團體報名學員,我們可以根據企業行業應用領域,調整課程內容要點。
4、以上所有課程結構和學習內容本公司會根據職業技能崗位需求和用人單位意見及時做出調整。
老師介紹:

孫老師 工控幫ABB工業機器人講師
畢業于哈爾濱劍橋學院電氣工程及自動化專業,本科學歷,曾經獨立或跟隨團隊參與過多個工業機器人系統集成項目,參加過abb、發那科等多家機器人專業培訓,參加過固高焊接實驗室培訓,曾主持編著《ABB工業機器人仿真應用技術》《ABB工業機器人實操與應用技巧》等書籍,近期一直從事工業機器人實操,仿真教學工作,教學經驗豐富,教學特點循序漸進,重視基礎,由淺入深。
教學優勢:
預約試聽,免費體驗!達不到預期效果可免費再學。
教學視頻反復看,學習資料免費拿,線上互動教學, 有問題老師及時解答。
線下實訓,小班授課,實訓老師手把手傳幫帶,學習效率有**。
實訓設備先進,**一人一機,確保充足的上機實操機會。
真實案例實地教學,,學習不再紙上談兵,讓你在短的時間里成為工控達人。
推薦就業,高薪無憂,工控幫手握多家名企人才訂單,讓您贏在起點!
終身服務,貼心關懷,握手工控幫,我們是一輩子的朋友。
校區地址
學校相冊
更多 >



學員點評
看過的人還關注了
更多適合課程
全城人工智能學校,一網打盡,立即搜索:
在線預約免費試聽
 官方授權聲明
官方授權聲明
尊敬的平臺會員您好,[長沙工控幫教育]資質文件正在審核中。如需了解[長沙工控幫教育]服務明細或申請試聽服務,
請點擊:聯系客服。



.png)
.png)
.png)
.png)













 粵公網安備 44010602004272號
粵公網安備 44010602004272號
100%滿意度
長沙工控幫教育
綜合
環境 : 5.0師資 : 5.0教學 : 5.0